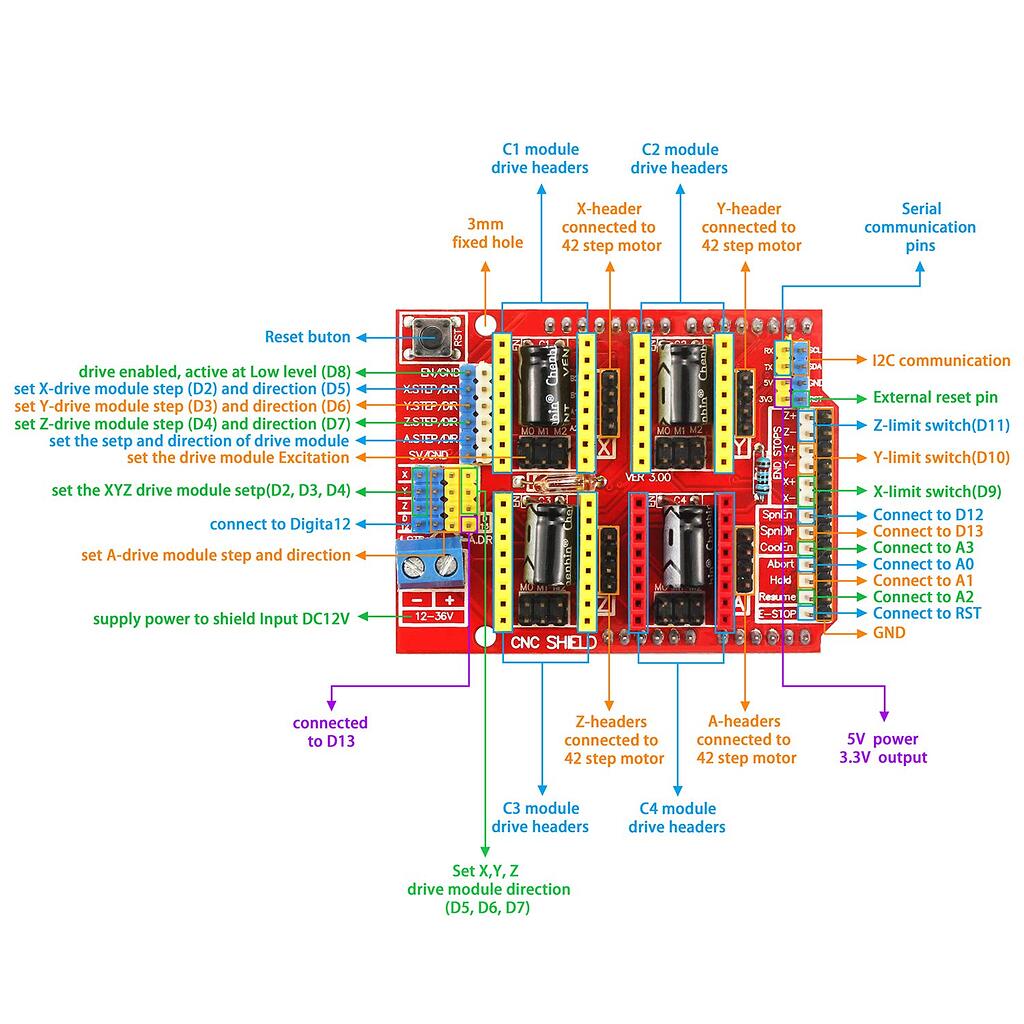
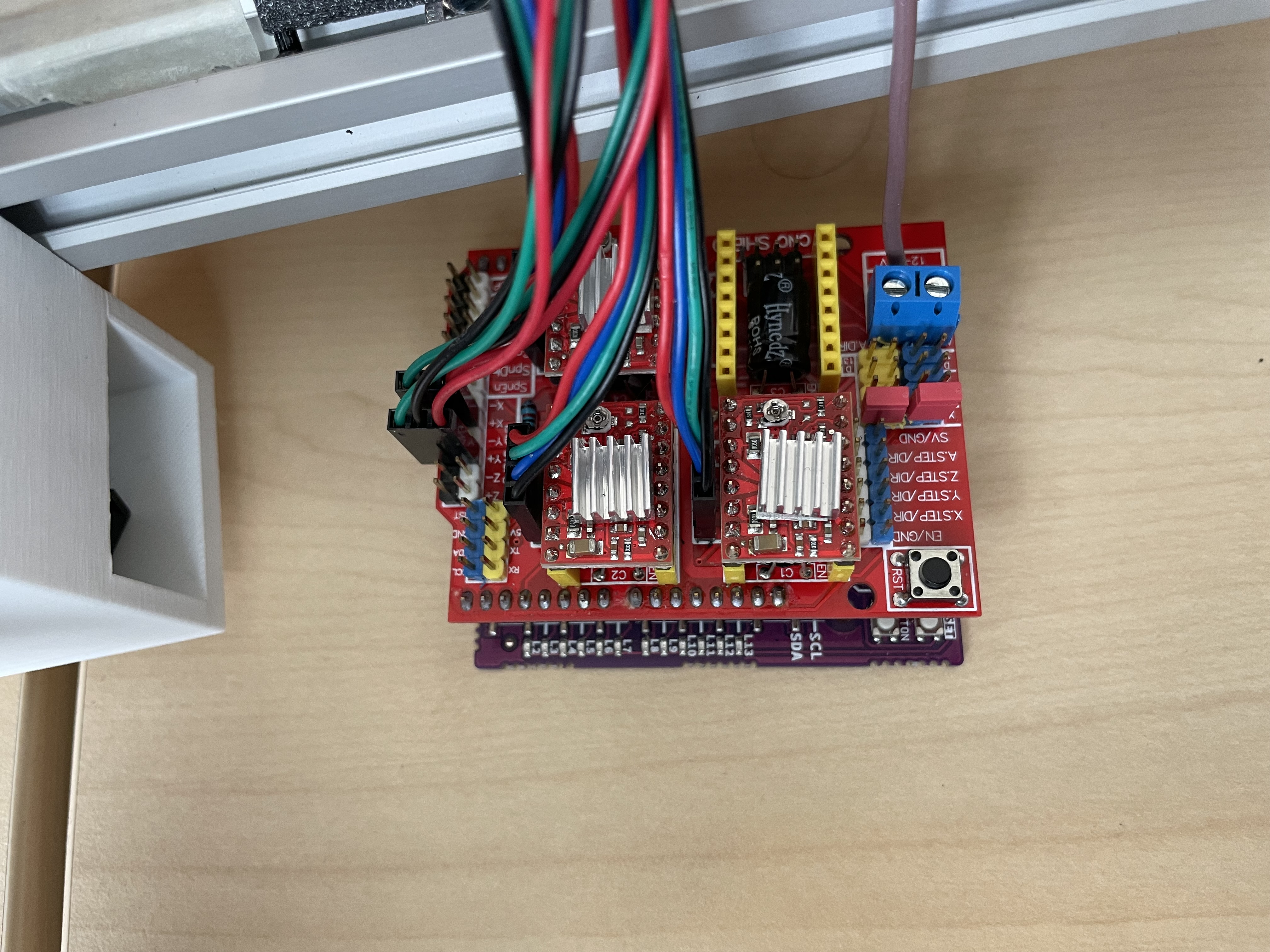
- Branchement des 3 moteurs pas à pas:

Explications: Chaque moteur possède 4 fils dont:
-
Les fils rouges et bleus sont étiquetés comme les connexions positives pour la bobine A et la bobine B respectivement,
-
Le vert et le noir correspondent aux pôles négatifs de ces bobines respectivement.
Chaque module contrôle un moteur pas à pas (X,Y,A) sur la CNC Shield. Sachant que deux des moteurs sont placés sur l’axe X et un autre moteur sur l’axe Y.
L’ordre des fils dépend du moteur, mais:
- Si le moteur vibre sans tourner alors les fils sont mal placés,
- Si le sens est inversé il faudra inverser les fils des moteurs,
-
L’utilisation des jumpers nous permettent de dupliquer le signal du moteur pas à pas situé sur l’axe X vers l’axe A.
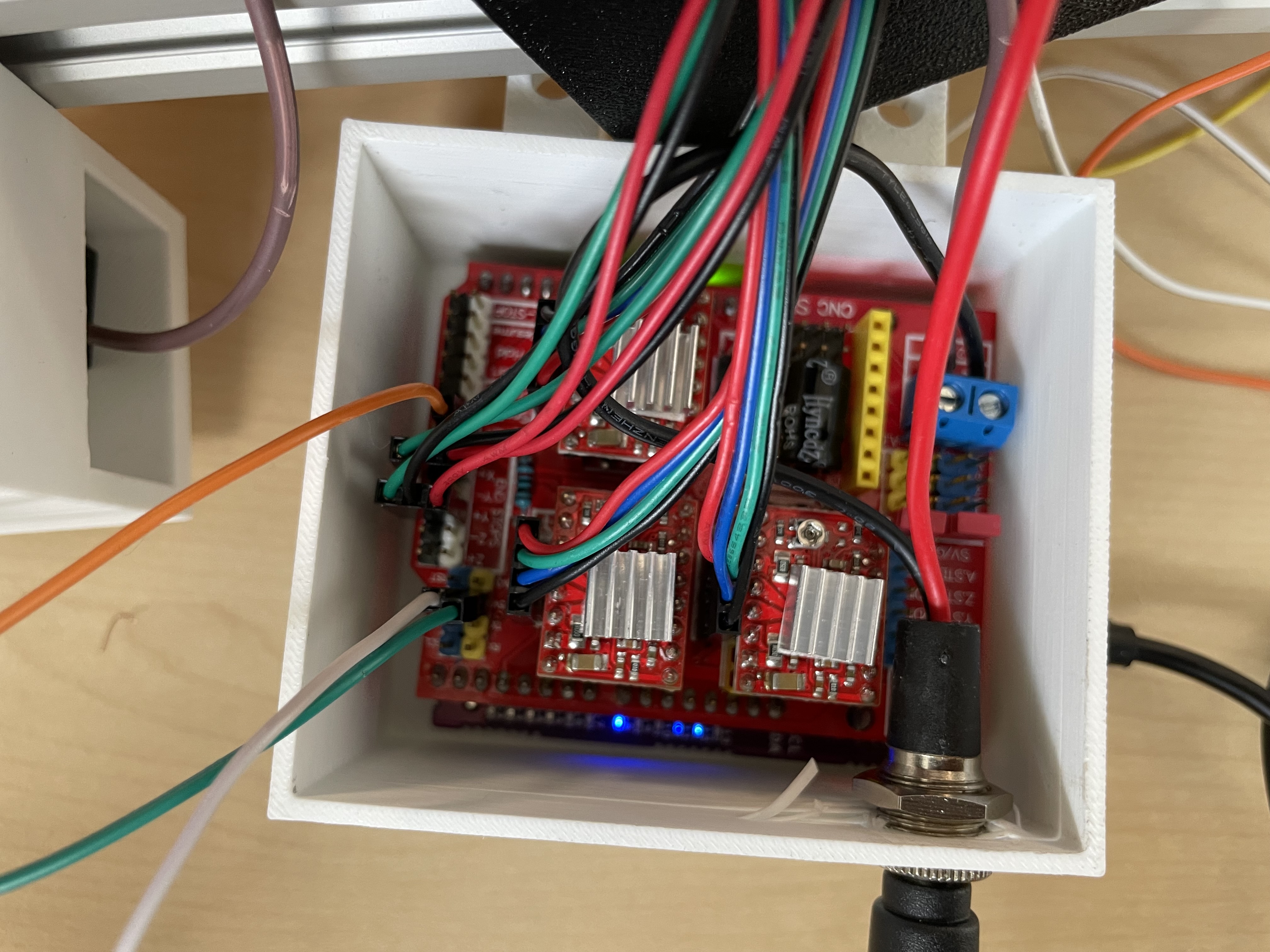
- Branchement des interrupteurs fin course
Un interrupteur est constitué de trois fils de couleurs distinctes : vert, rouge et noir. Dans le cadre de notre robot, nous utilisons deux interrupteurs de fin de course : l’un est installé sur l’axe X et l’autre sur l’axe Y.
L’interrupteur dédié à l’axe X est connecté à la broche X+ ainsi qu’à la masse (GND). De même, l’interrupteur positionné sur l’axe Y est relié à la broche Y+ et à la masse (GND).
Il est important de noter que seuls les fils rouge et noir sont utilisés pour le branchement : le fil rouge est connecté à la broche (X+ ou Y+) tandis que le fil noir est relié à la masse (GND). Le fil vert n’est donc pas utilisé dans cette configuration.
- Branchement des servomoteurs :
Explications:
Chaque servomoteur possède 3 fils dont :
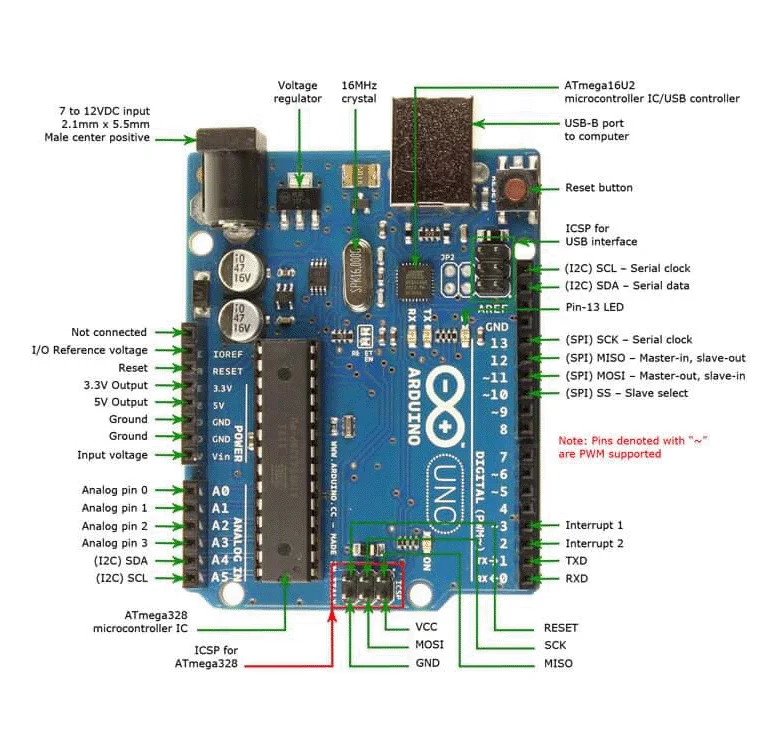
- La couleur jaune est reliée sur une pin de la carte Arduino
- La couleur marron est reliée au GND
-
La couleur rouge est reliée au Vcc
- Branchement de l’electrovanne