Préparation des Matériaux
Cette section décrit la première étape du processus de fabrication : la préparation des matériaux.
Liste des Matériaux
| Visuel | Composant | Description & Rôle | Spécifications / Usage | Voici la liste des composants utilisés pour le projet.
| Visuel | Composant | Description & Rôle | Spécifications / Usage |
|---|---|---|---|
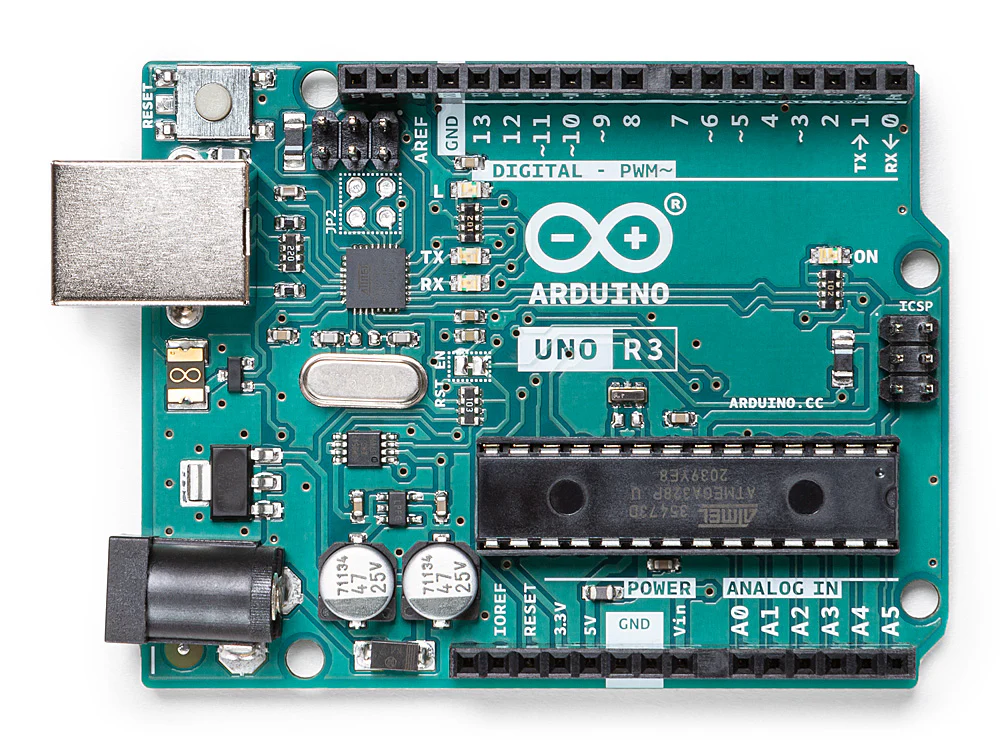 | Arduino Uno | Carte à microcontrôleur principale. C’est le cerveau du robot qui exécute la logique de commande. | 1 unité |
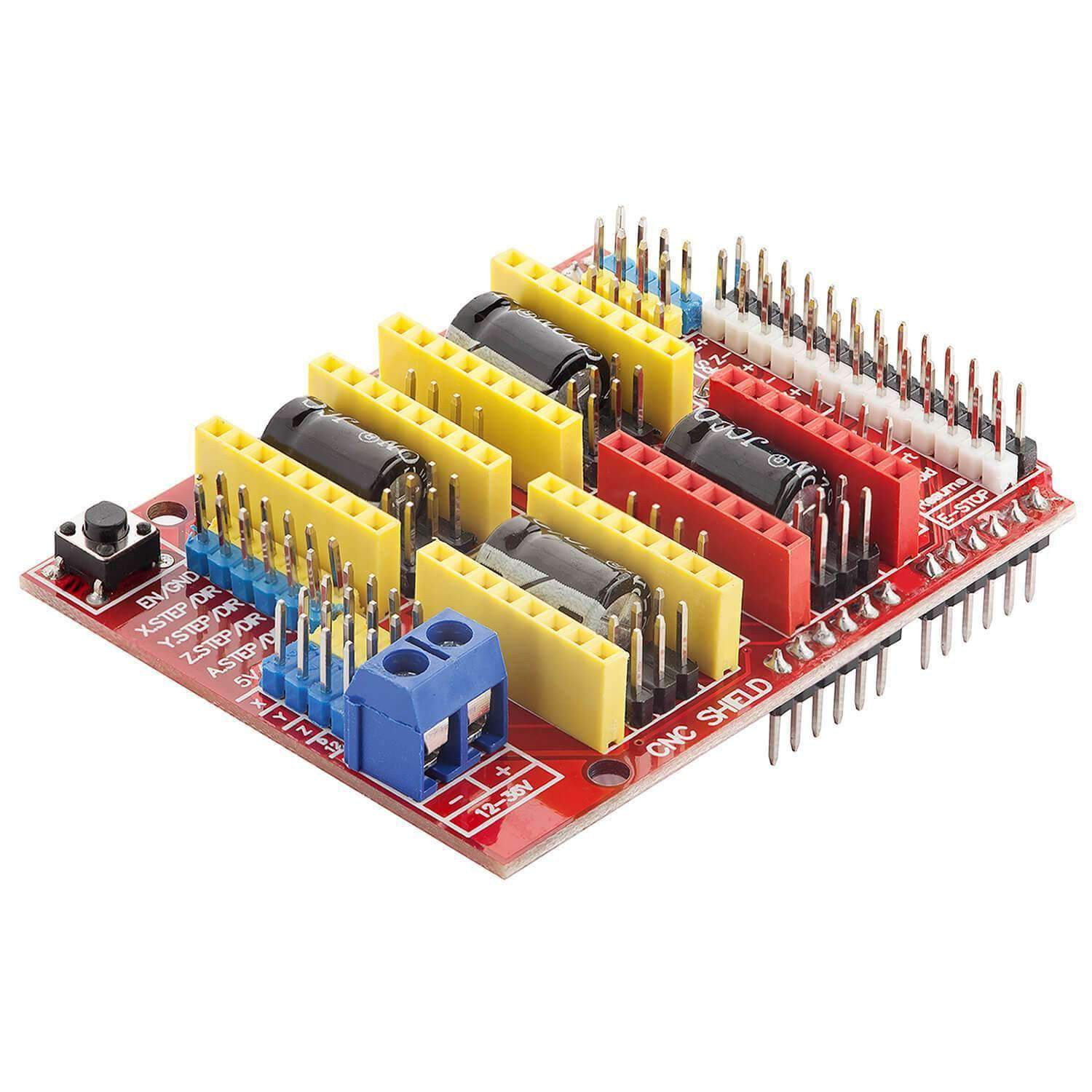 | CNC Shield (V3) | Carte d’extension pour l’Arduino. Permet de centraliser le câblage et de piloter facilement plusieurs axes. | 1 unité |
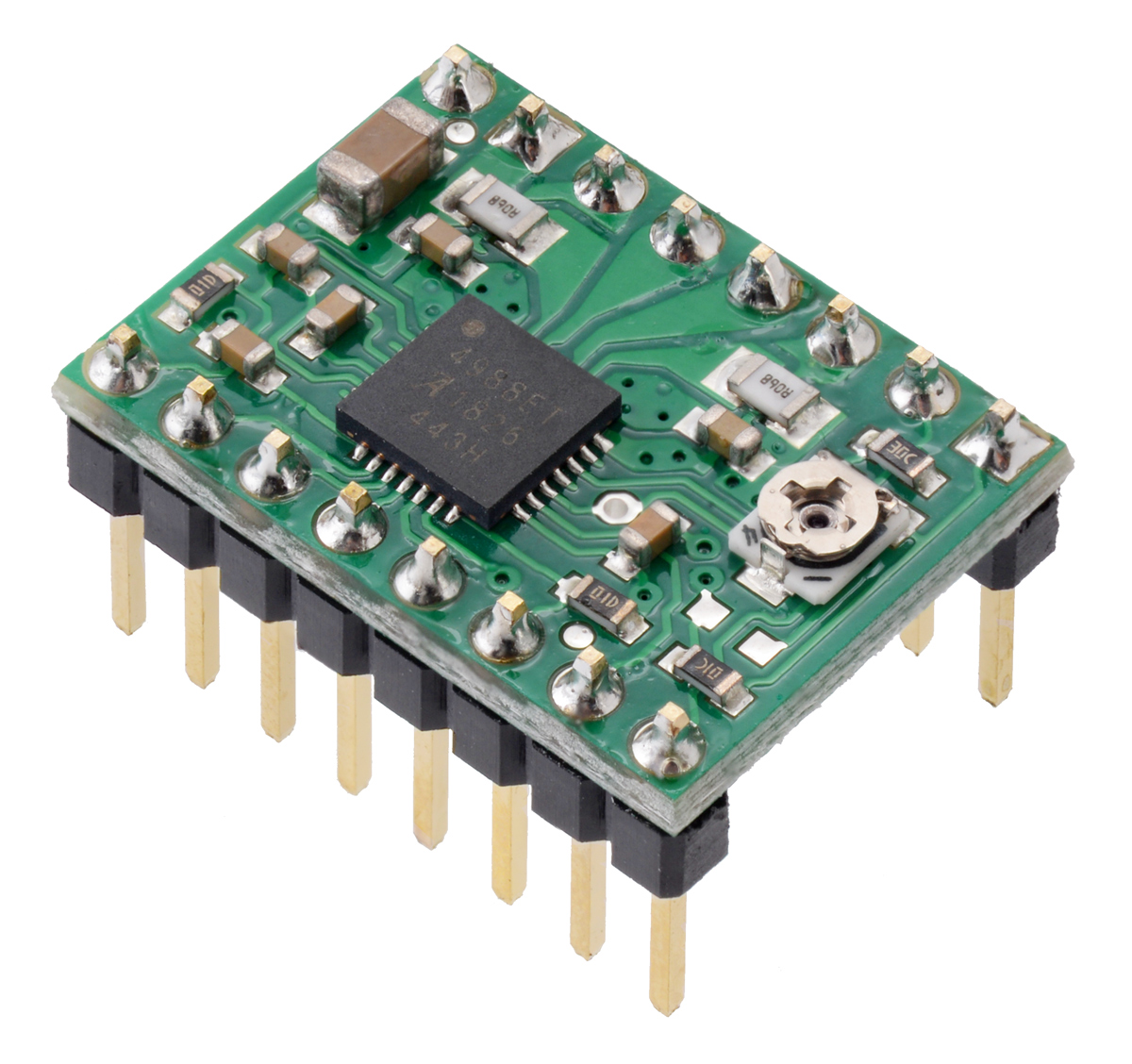 | Driver de moteur (A4988 / DRV8825) | Petit module de puissance s’insérant sur la CNC Shield pour contrôler le courant envoyé aux moteurs pas-à-pas. | 1 par moteur |
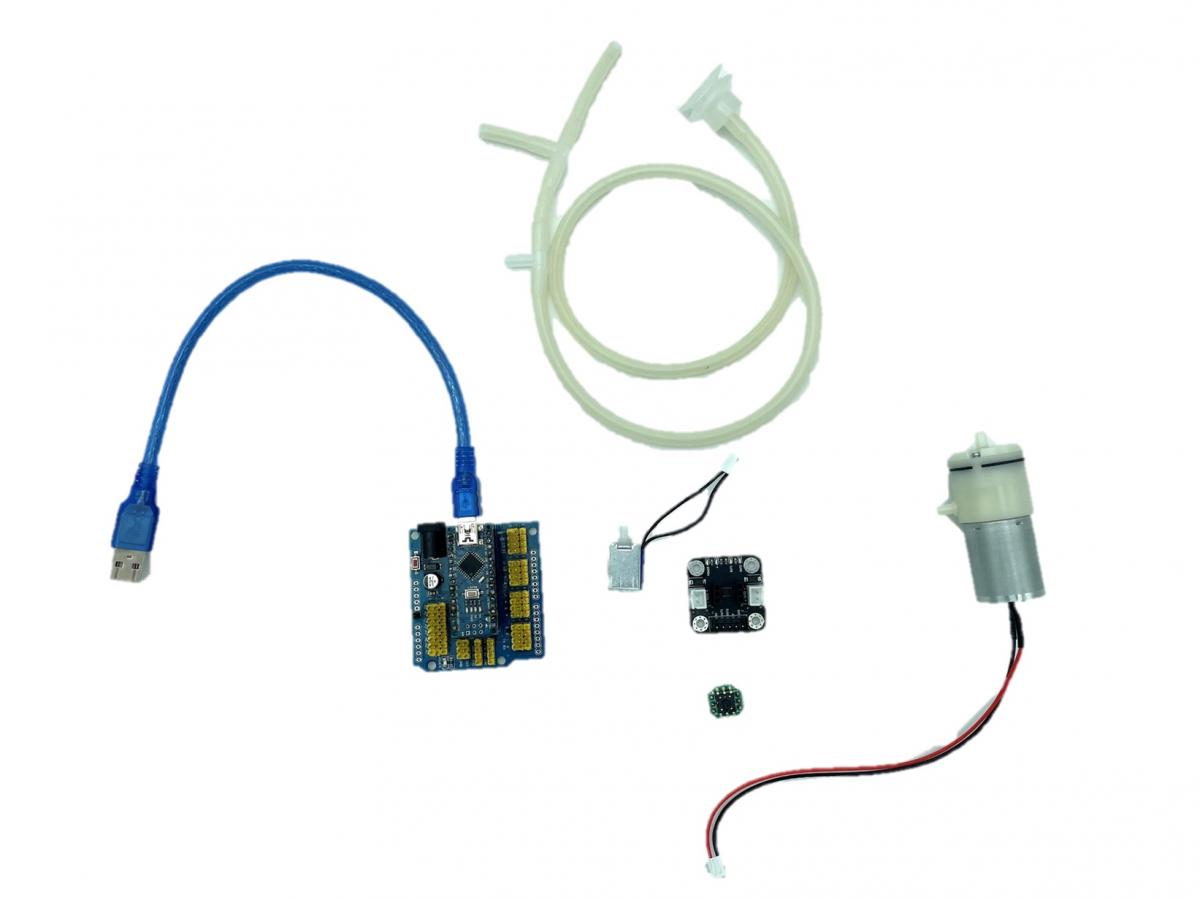 | Kit préhenseur pneumatique | Ensemble comprenant une mini-pompe à vide et une électrovanne (EV) reliées à une ventouse pour la saisie des pièces. | 1 kit |
 | Servomoteur | Actionneur rotatif idéal pour piloter un mouvement angulaire limité (par exemple, l’orientation de la ventouse ou un mécanisme d’échappement). | Selon design |
 | Moteur pas-à-pas (NEMA 17) | Moteur haute précision pour gérer les déplacements linéaires ou angulaires précis des axes du robot. | Selon axes |
| Profilés Aluminium (Type V-Slot 2020) | Structure principale et axes linéaires du châssis. | 4 x 400mm |
Procédure de Préparation
Cette phase de préparation se divise en trois étapes obligatoires pour sécuriser la fabrication : s’approprier la documentation, valider le matériel par des tests unitaires, puis procéder aux découpes mécaniques.
1. Étude de la Documentation des Matériaux
Avant toute manipulation, il est indispensable de consulter les fiches techniques (datasheets) des composants disponibles dans le dossier docs/datasheets/ du dépôt.
- Vérification des tensions : Identifier la tension nominale de chaque élément (5V pour l’Arduino, 12V/24V pour la CNC Shield et la pompe pneumatique).
- ** brochage (Pinout) :** Repérer les broches de commande des drivers et le sens d’insertion sur la CNC Shield pour éviter les inversions.
- Limites mécaniques : Prendre connaissance du couple maximal des moteurs pas-à-pas et de la course utile des axes pour ajuster les futurs fins de course.
2. Tests Individuels (Tests Unitaires du Matériel)
Chaque composant doit être validé indépendamment “sur table” avant l’assemblage final.
- L’Arduino Uno : Brancher la carte seule en USB. Téléverser un programme servant à allumer les LED par exemple pour s’assurer que le microcontrôleur est fonctionnel.
- La CNC Shield & Drivers : Insérer un seul driver. Alimenter la carte en puissance (12V) et mesurer la tension de référence ($V_{ref}$) au multimètre sur le potentiomètre du driver. Ajuster le courant pour qu’il corresponde au courant nominal du moteur pas-à-pas.
- Les Moteurs Pas-à-Pas : Connecter un moteur au driver testé, charger un script de rotation simple (Grbl ou script d’essai standard) et vérifier que le moteur tourne sans sauter de pas ni surchauffer.
- Le Kit Pneumatique : Alimenter brièvement la mini-pompe en 12V pour vérifier l’aspiration. Tester le déclenchement de l’électrovanne.
- Le Servomoteur : Connecter à l’arduino, lancer un programme visant à le faire tourner
3. Découpage et Usinage
Une fois l’électronique validée, on prépare la structure physique au MakerSpace.
- Profilés Aluminium : Mesurer et marquer les longueurs de profilés nécessaires à l’aide d’un trusquin ou d’un réglet de précision. Effectuer la découpe à la scie à ruban ou à la scie circulaire à métaux. Ébavurer soigneusement les bords à la lime plate.
- Plaques de Support (Plexiglas/PMMA) : Exporter les plans de la base du robot au format
.DXF. Charger le fichier dans le logiciel de la découpeuse laser du MakerSpace. Ajuster la vitesse et la puissance selon l’épaisseur de la plaque pour obtenir une coupe nette sans brûlure. - Pièces Imprimées 3D : Générer les fichiers
.GCODEvia le slicer (Cura, PrusaSlicer) pour les pièces de fixation. Lancer les impressions et retirer délicatement les supports à la pince coupante.
Conseils de Sécurité & Gestion des Blocages
1. Sécurité Électrique : Protection du Matériel
- Double vérification des alimentations : Avant de mettre le système sous tension, validez systématiquement les polarités au multimètre. Une inversion de polarité ou une tension trop élevée (ex: envoyer du 12V directement sur une broche 5V de l’Arduino) détruira instantanément vos composants.
- Manipulations hors tension : Ne connectez et ne déconnectez jamais un moteur pas-à-pas ou un driver de la CNC Shield lorsque la carte est alimentée. Cela crée des arcs électriques internes qui grillent les puces instantanément.
2. Sécurité des Machines & Qualité de Fabrication
- Vérification de l’imprimante 3D : Avant de lancer une longue impression, inspectez la machine : nettoyage du plateau (adhérence), vérification du niveau du lit (bed leveling) et état de la buse. Une mauvaise configuration entraîne des décollages (warping) ou des tolérances géométriques faussées, rendant les pièces mécaniques inutilisables pour l’assemblage.
- Règle de la machine inconnue : Si une machine nécessaire au projet (découpeuse laser, scie à ruban, thermoformeuse) n’est pas maîtrisée par l’équipe, il est strictement obligatoire de demander l’aide ou une formation à un encadrant ou au fabmanager avant toute utilisation. Ne prenez aucun risque inutile.