I.Conception mecanique
Conception Mécanique
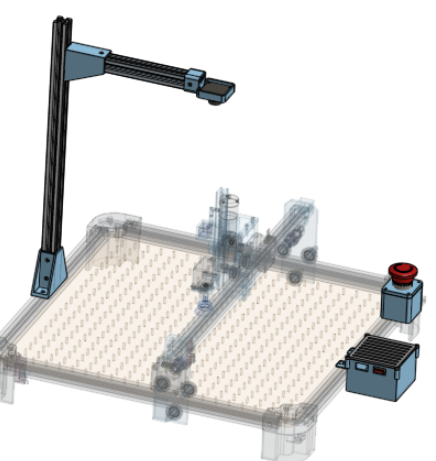
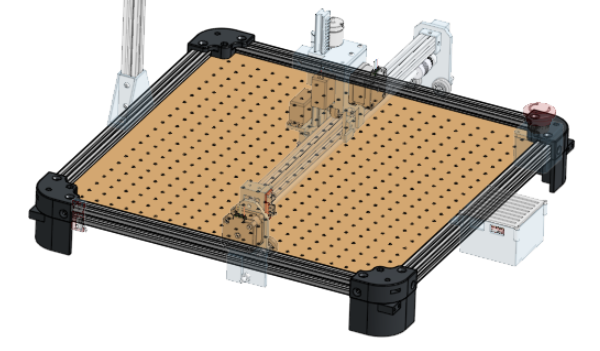
1. Structure Principale et Châssis
- Bâti en profilés d’aluminium : Le châssis principal est construit à partir de profilés standards. Ce choix garantit une excellente rigidité structurelle tout en conservant une grande modularité pour l’assemblage et l’ajustement des équerrages.
-
Pieds de surélévation sur mesure : De nouveaux pieds supports ont été spécifiquement conçus et intégrés pour surélever le plateau de travail. Ce dégagement vertical est indispensable : il permet le passage fluide des éléments de transmission sous la zone d’assemblage et facilite le débattement des différents axes de la machine sans risque de collision.
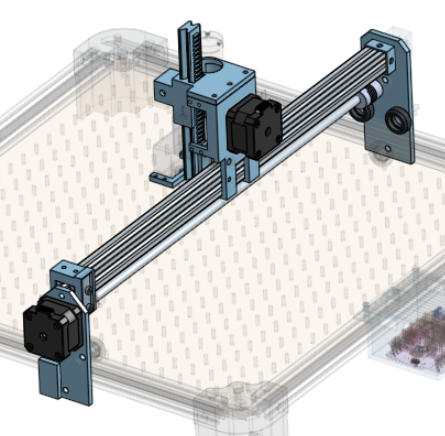
2. Cinématique de Déplacement (Axes X et Y)
- Transmission de l’axe X : Le déplacement longitudinal du portique est piloté par un moteur pas à pas. Pour garantir un mouvement parfaitement translationnel et éviter l’arc-boutement, le système de guidage s’appuie sur deux rails latéraux. La synchronisation de l’entraînement entre les deux côtés est assurée par une barre de transmission métallique, accouplée directement à l’arbre du moteur via deux coupleurs flexibles.
-
Guidage de l’axe Y : Le moteur pas à pas gérant l’axe transversal (Y) est directement embarqué sur la structure mobile, assurant le déplacement de la tête de préhension sur toute la largeur du portique.
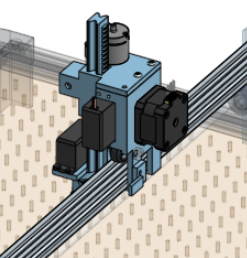
3. Tête de Préhension (Outil et Axe Z)
La tête de l’effecteur est l’élément central pour la manipulation des pièces. Elle a été compactée au maximum pour intégrer de multiples fonctions mécaniques :
- Déplacement vertical (Axe Z) : Un système de pignon-crémaillère a été intégré pour convertir le mouvement de rotation du moteur en un déplacement vertical linéaire de la ventouse.
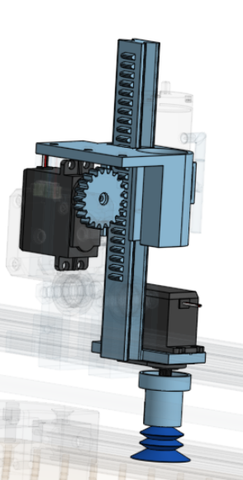
- Rotation de la pièce : Un support orientable est fixé au bout de la crémaillère pour faire pivoter la ventouse, permettant d’ajuster l’angle de la pièce de puzzle avec précision avant sa pose.
-
Intégration pneumatique : La tête dispose de supports de fixation dédiés pour embarquer directement la pompe à vide et l’électrovanne. Cette proximité avec la ventouse réduit la longueur du circuit d’air et garantit un temps de réponse immédiat lors de la préhension et du relâchement.
4. Boîtier d’Intégration et Support Caméra
Pour finaliser la machine, la rendre autonome et sécuriser les utilisateurs, un boîtier global a été modélisé :
- Organisation de l’électronique : Il comprend les supports de fixation sur mesure pour la carte de contrôle principale, facilitant le routage propre des câbles.
- Sécurité et Capteurs : Des emplacements spécifiques et rigides sont prévus pour le maintien des capteurs de fin de course, ainsi qu’une façade accessible pour le bouton d’arrêt d’urgence.
-
Module Vision : Le boîtier intègre également la base de maintien du profilé vertical dédié à la caméra. Ce système de fixation garantit que l’objectif reste parfaitement stable et centré au-dessus de la zone de travail, ce qui est crucial pour la précision de l’algorithme de détection.