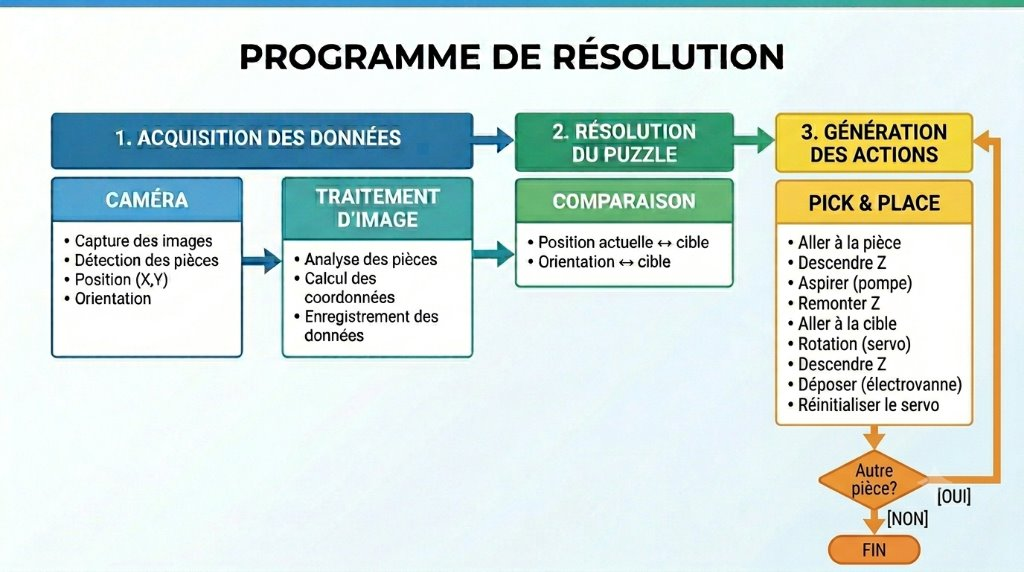
Logique générale de résolution
Une fois les étapes de calibration terminées, le programme principal est chargé de détecter les pièces du puzzle, de calculer leurs positions réelles sur le plateau et de piloter la machine afin d’effectuer les déplacements nécessaires.
Le fonctionnement du programme est divisé en deux grandes phases.
Phase 1 : Acquisition des positions
Dans un premier temps, la caméra est utilisée pour enregistrer :
- la position finale souhaitée des pièces
- la position actuelle des pièces à déplacer.
Ces informations sont stockées en mémoire et serviront de base à toute la résolution.
Une fois les coordonnées enregistrées, la caméra n’est plus nécessaire.
Phase 2 : Séquence de déplacement et de rotation
Une fois les positions enregistrées, le programme compare pour chaque pièce :
- sa position actuelle
- sa position cible
- son orientation actuelle
- son orientation attendue.
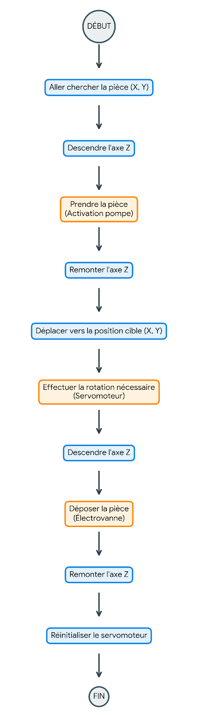
Pour chaque pièce, le programme génère une séquence complète de type Pick-and-Place avec correction d’orientation.
| Pick and Place |
|---|
 |