Vue d’ensemble
KiCad · PCB custom
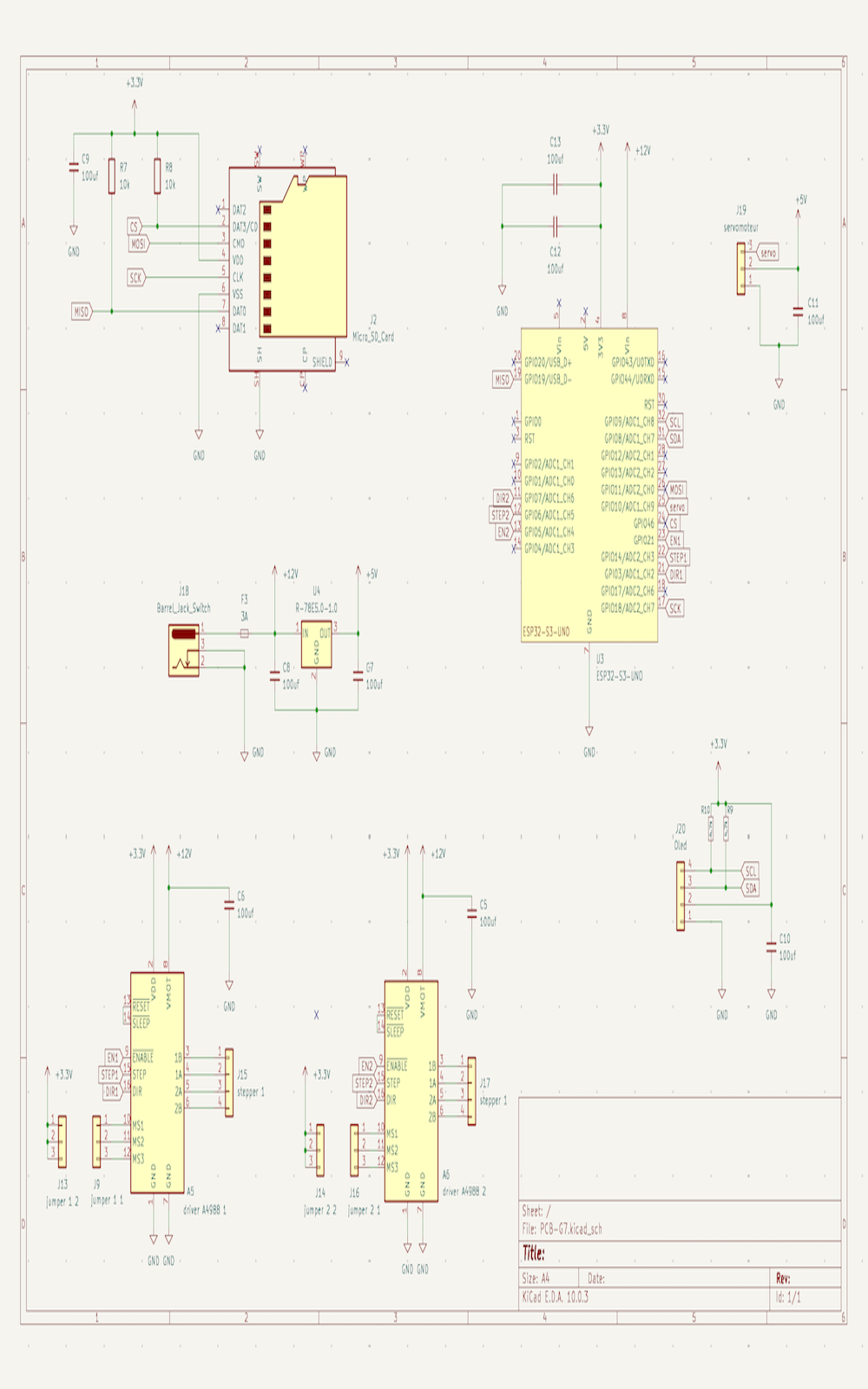
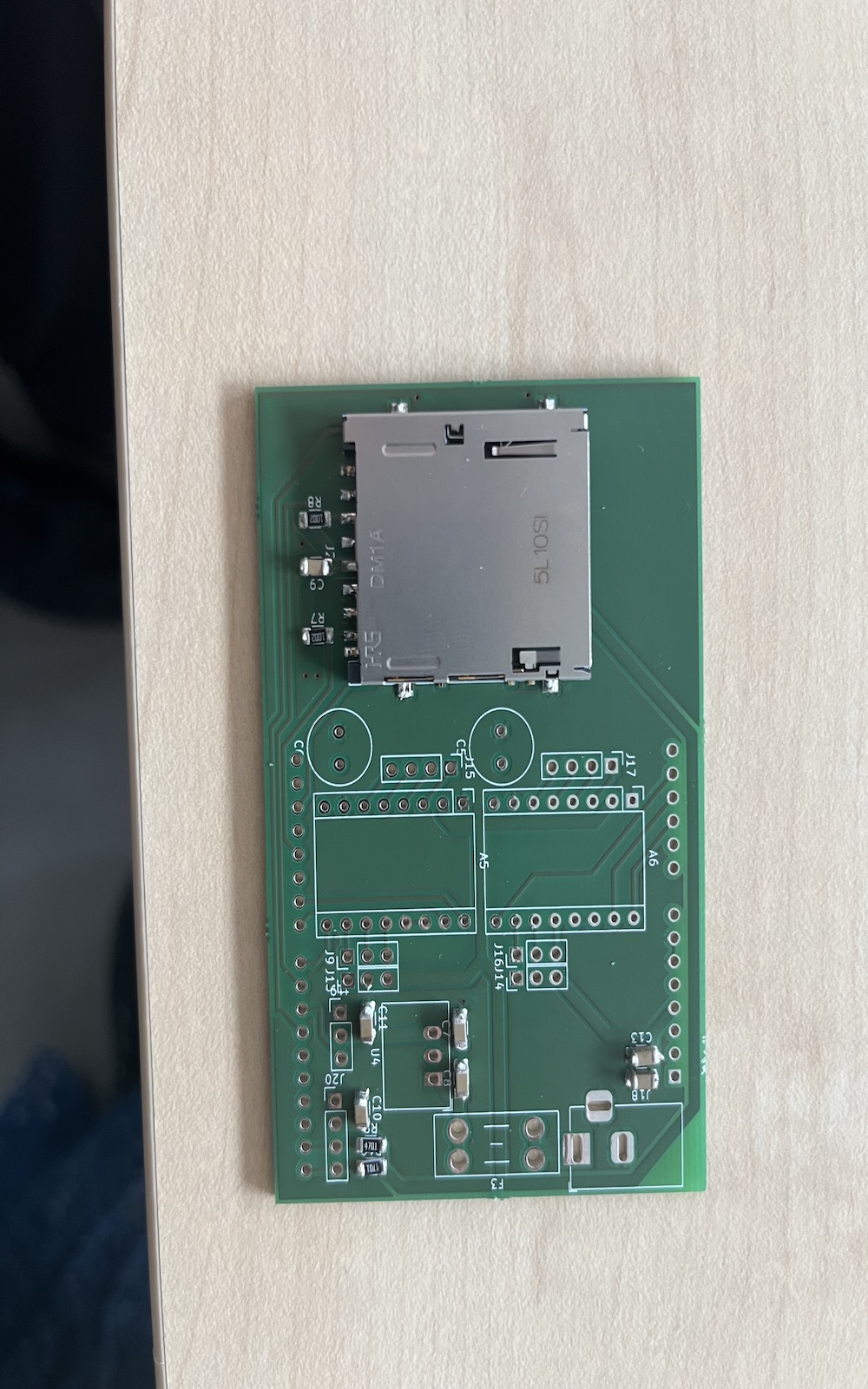
Le PCB du DrawBot A4 est conçu autour d'une carte ESP32 au format Uno, de drivers A4988 pour les moteurs pas à pas et d'un stockage sur carte micro SD. L'alimentation logique de l'ESP32 est fournie en 5 V tandis que les moteurs sont alimentés en 12 V (séparation puissance / logique).
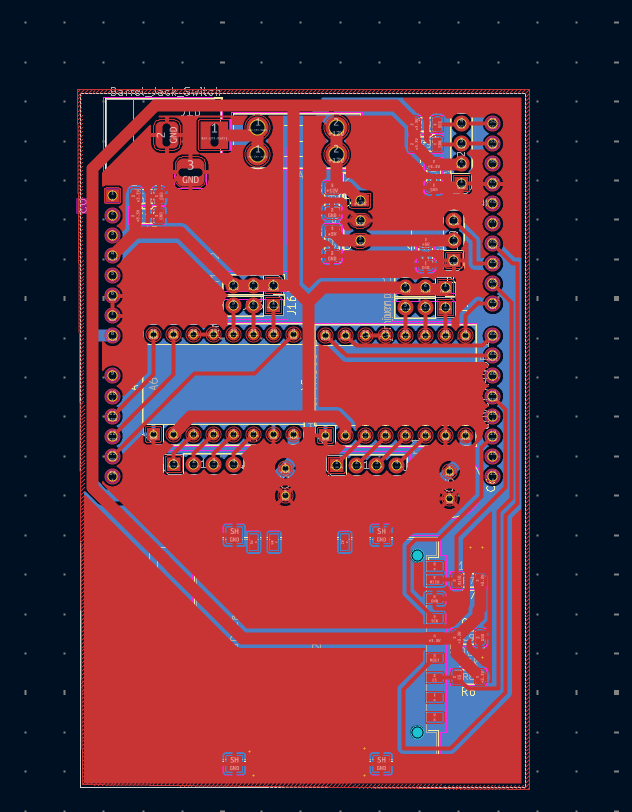
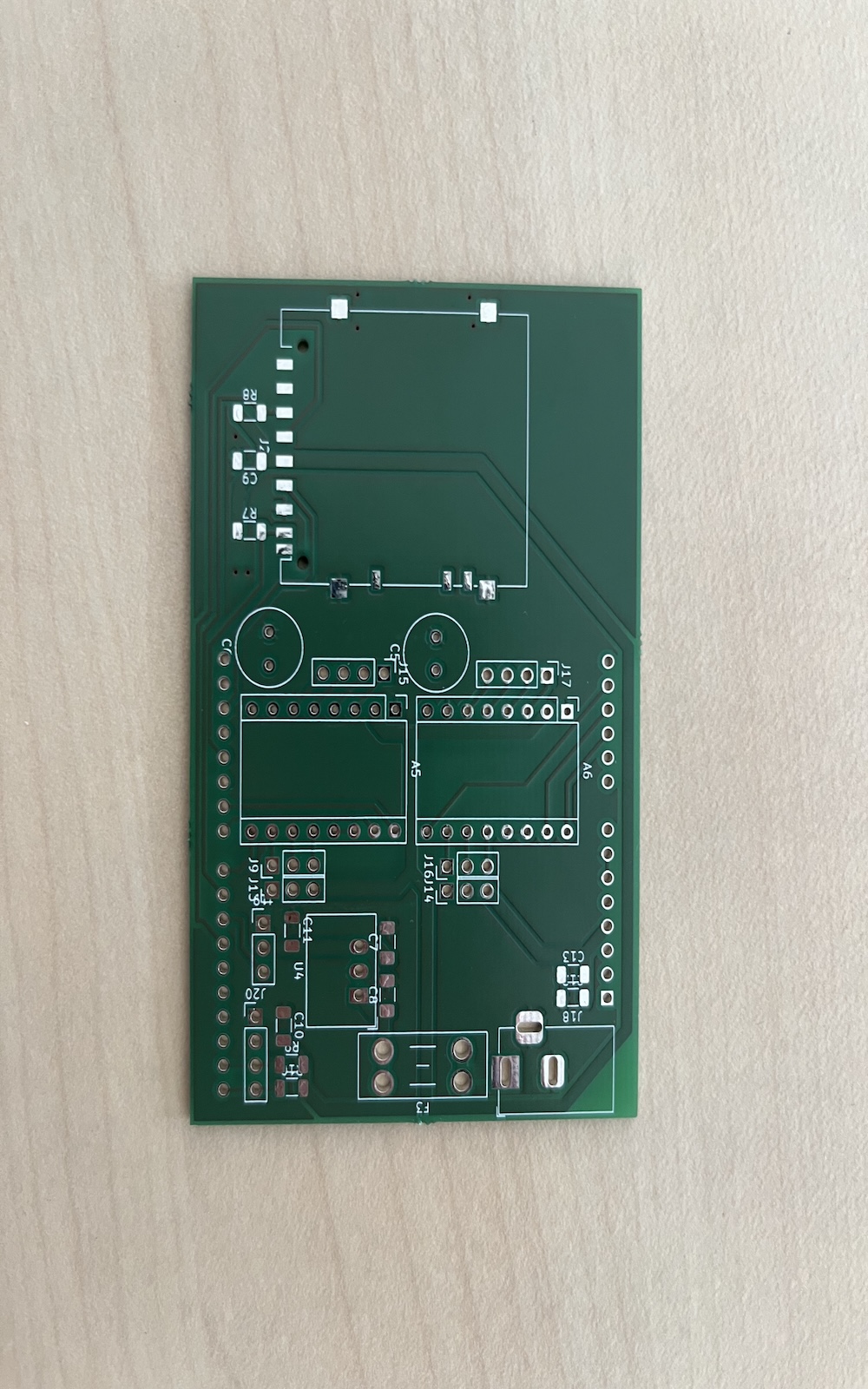
Le PCB du DrawBot A4 a été conçu pour éviter un câblage dispersé et structurer l’intégration autour d’un ESP32, de drivers moteurs pas à pas et d’un stockage sur carte micro SD.
L’objectif n’était pas seulement de faire fonctionner le robot, mais de disposer d’une carte propre, documentable et reproductible, adaptée à un projet open-source de makerspace. L’implantation sépare les zones d’alimentation, de commande logique et de connexion aux moteurs afin de simplifier les essais et l’assemblage.
Entrée énergieAlimentation principale injectée sur la carte, protégée par fusible 3 A avant distribution vers les blocs critiques.
TraitementL’ESP32 reçoit les commandes, lit la configuration et pilote les signaux nécessaires aux moteurs.
ActionneursLes drivers traduisent les signaux STEP/DIR en commande de puissance pour les moteurs pas à pas.
StockageLe slot micro SD permet d’embarquer des fichiers utiles à l’exécution et au fonctionnement autonome.