Nadhem Bouajila
Site web · documentation · intégration médias · organisation · assemblage général
Site web
Documentation
Intégration médias
Organisation
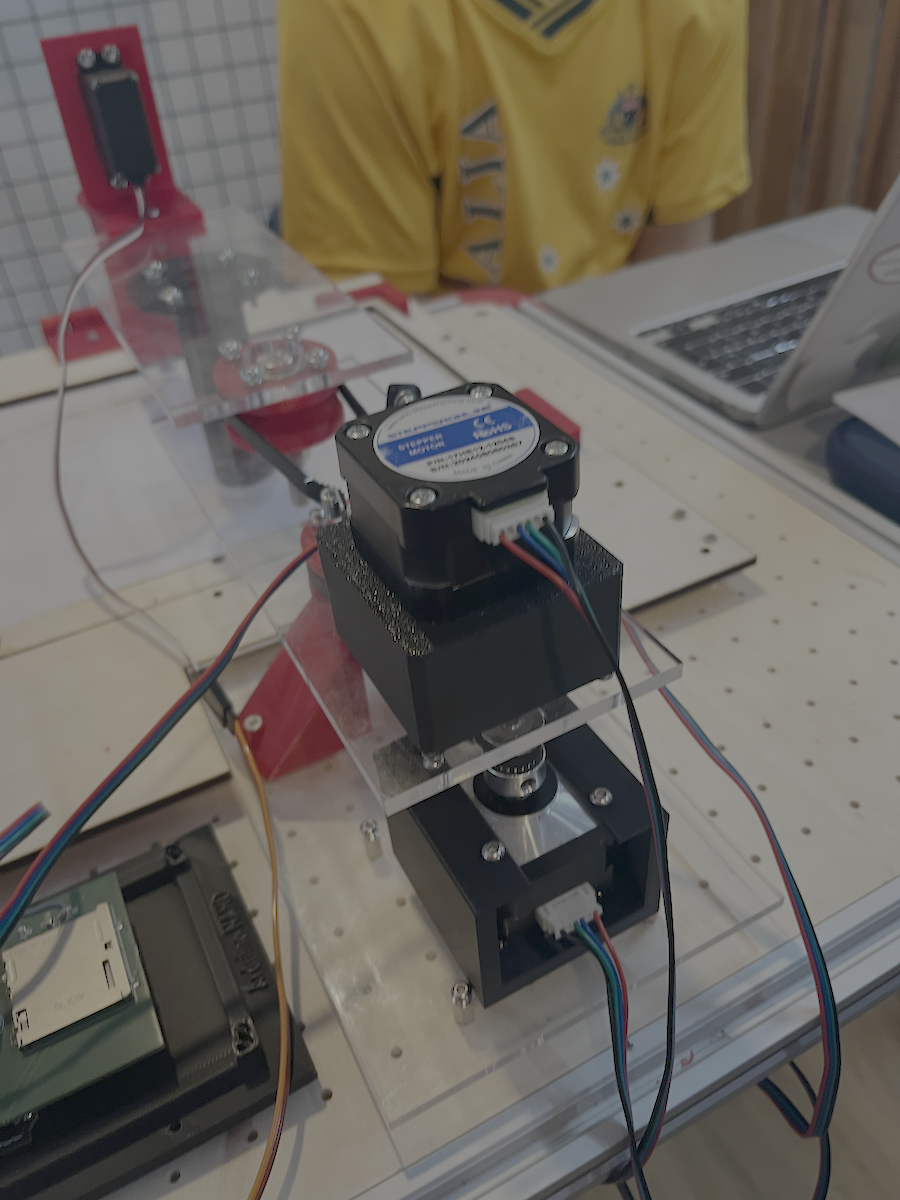
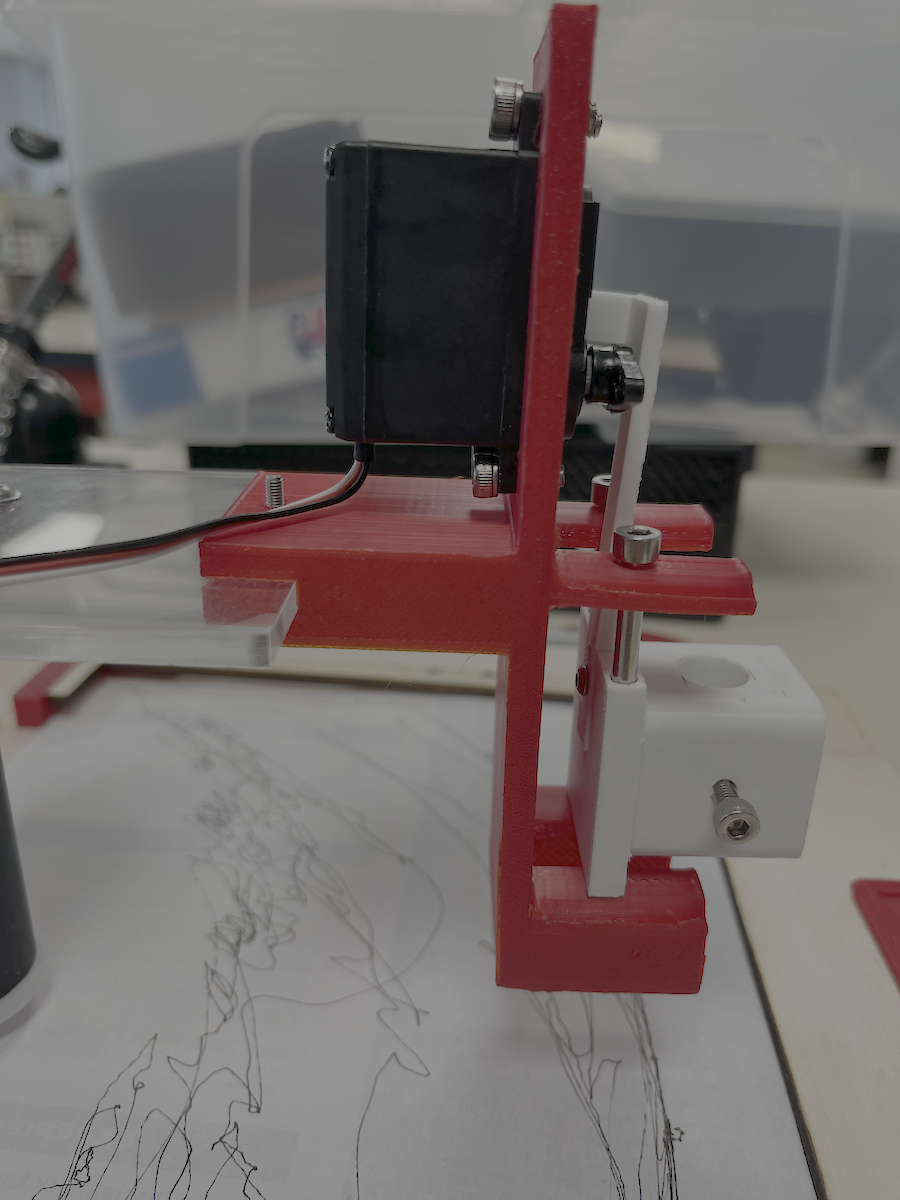
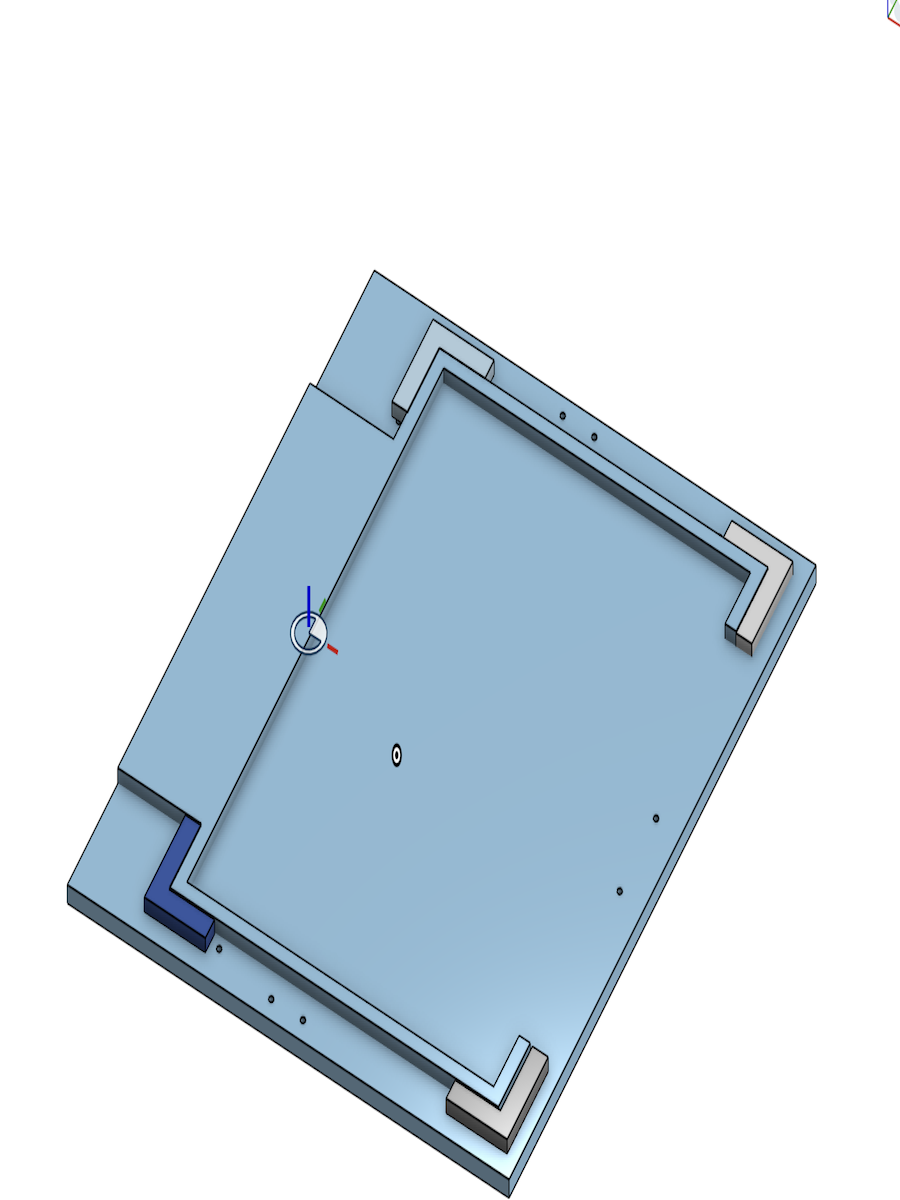
Assemblage général
Nadhem a porté la structuration du site, la documentation technique détaillée, l'intégration des contenus, images et vidéos, ainsi que le suivi d'ensemble du projet. Son rôle ne s'est pas limité à la partie web : il a également participé à l'assemblage général de la machine, à l'organisation des livrables et à la cohérence du dossier présenté au jury.