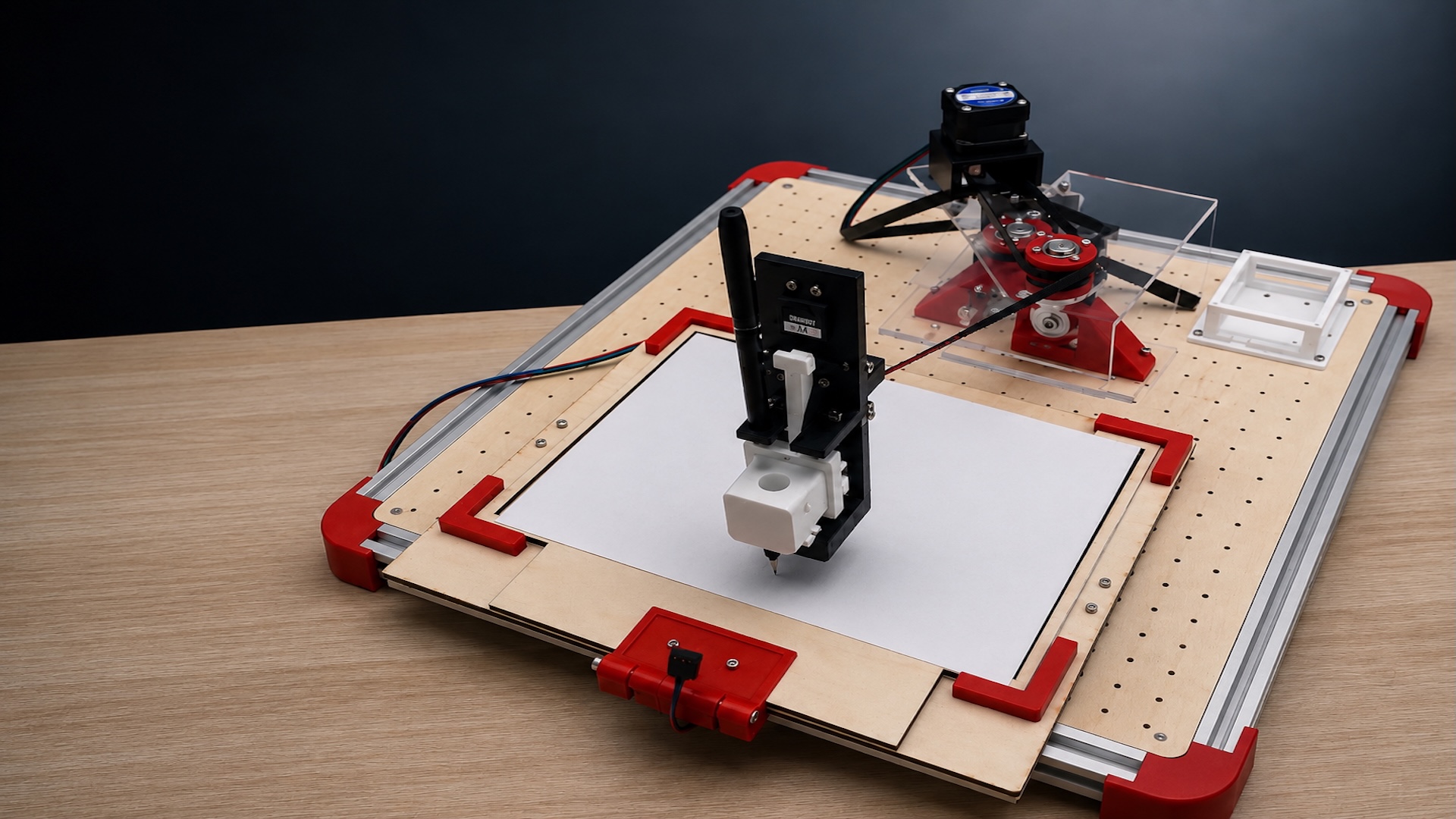
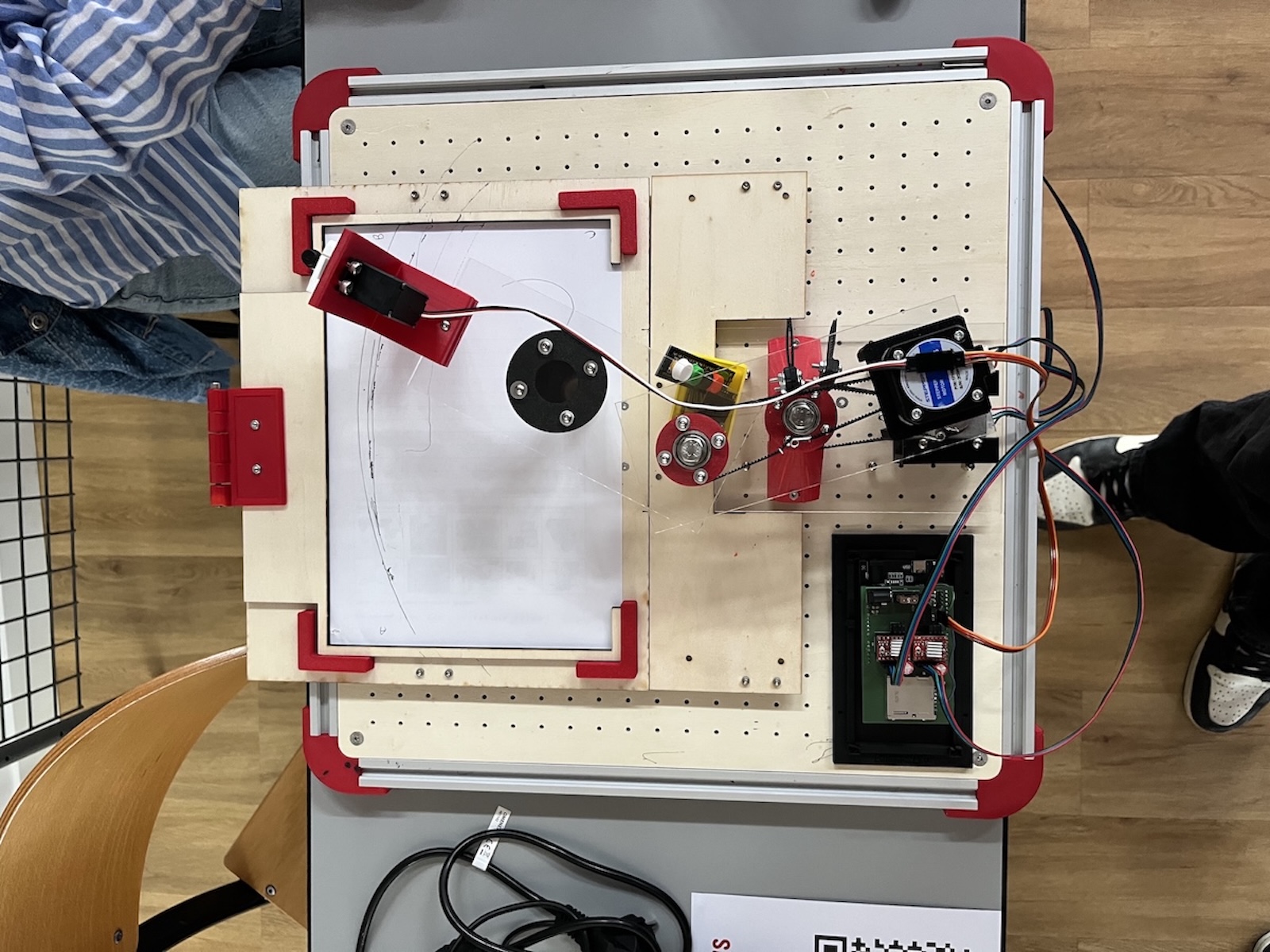
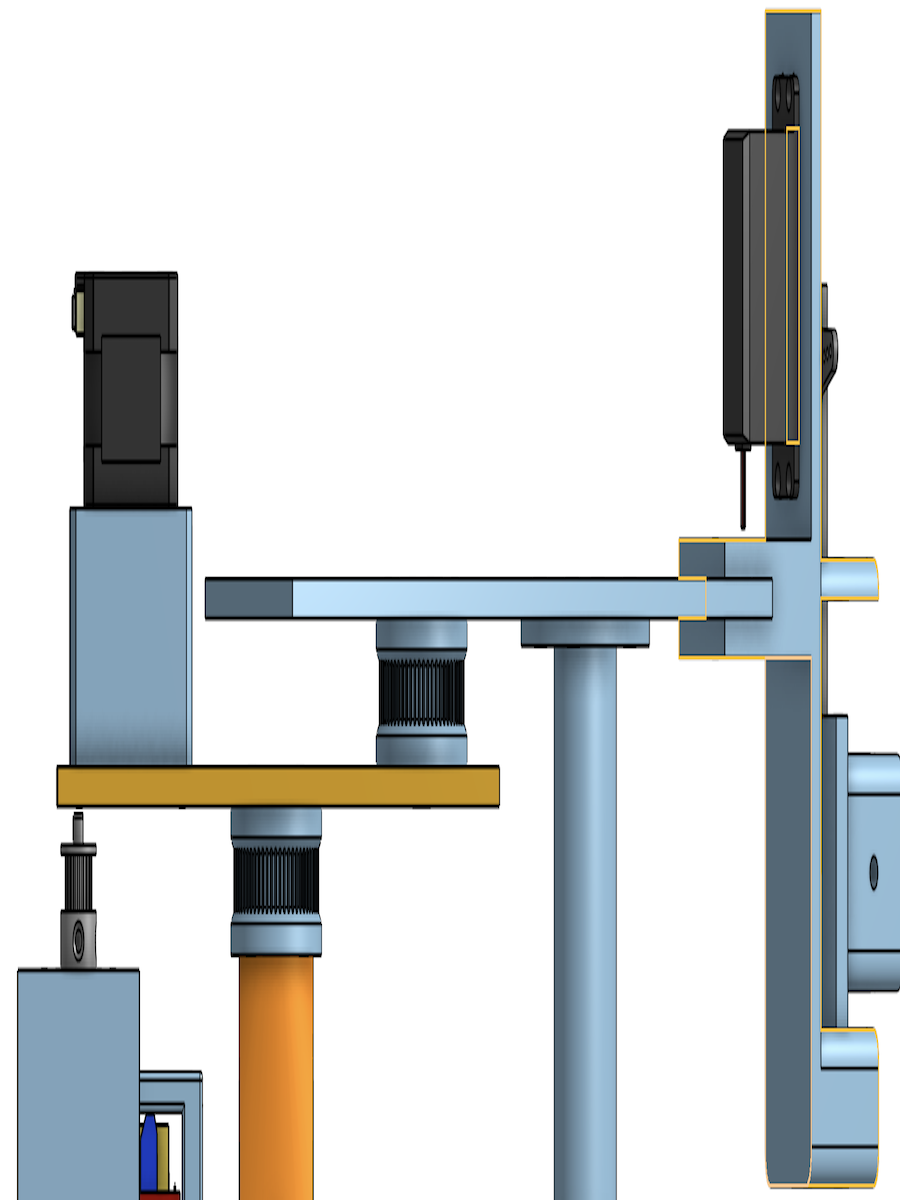
Le DrawBot A4 n’est pas une machine cartésienne : c’est un bras articulé à deux segments conçu pour parcourir une feuille A4 en combinant transmission par courroies GT2, cinématique pilotée en firmware et calibration fine.
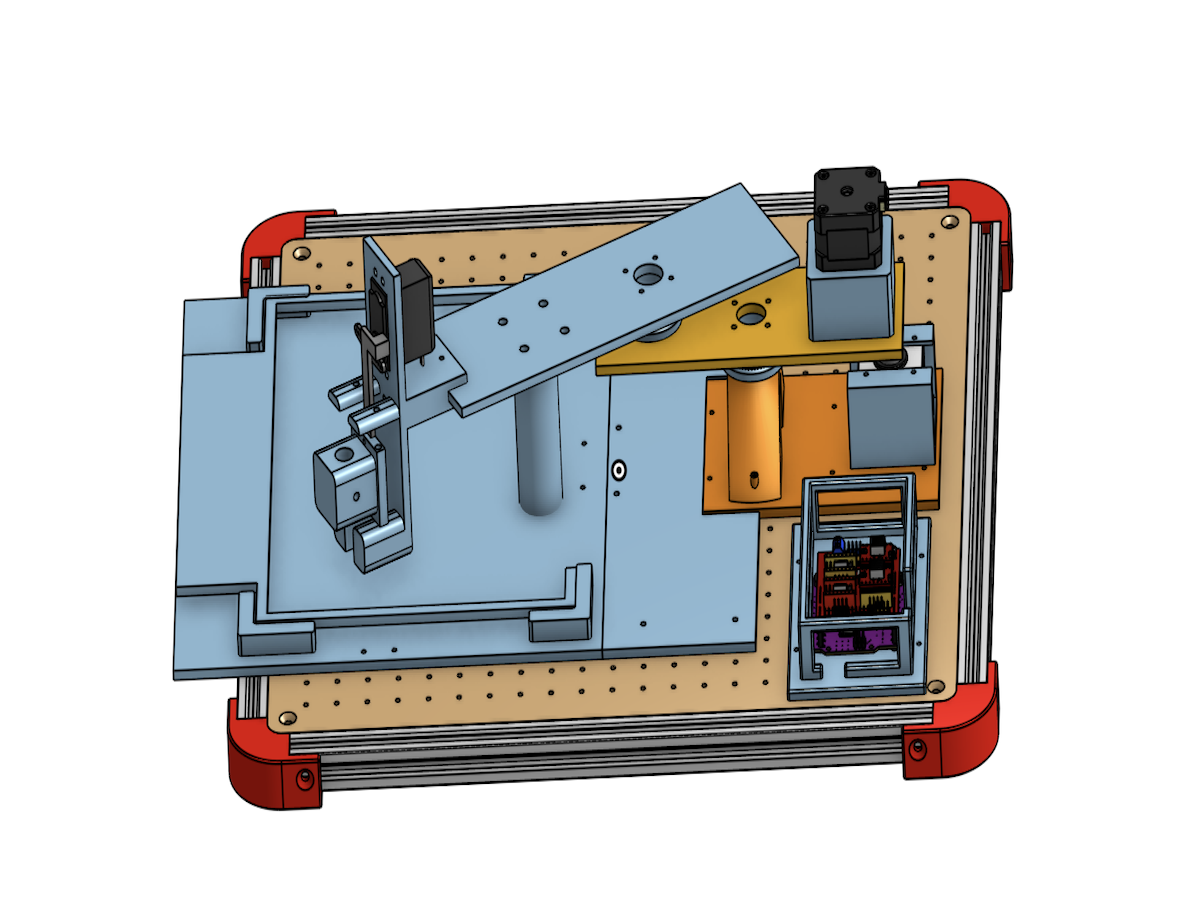
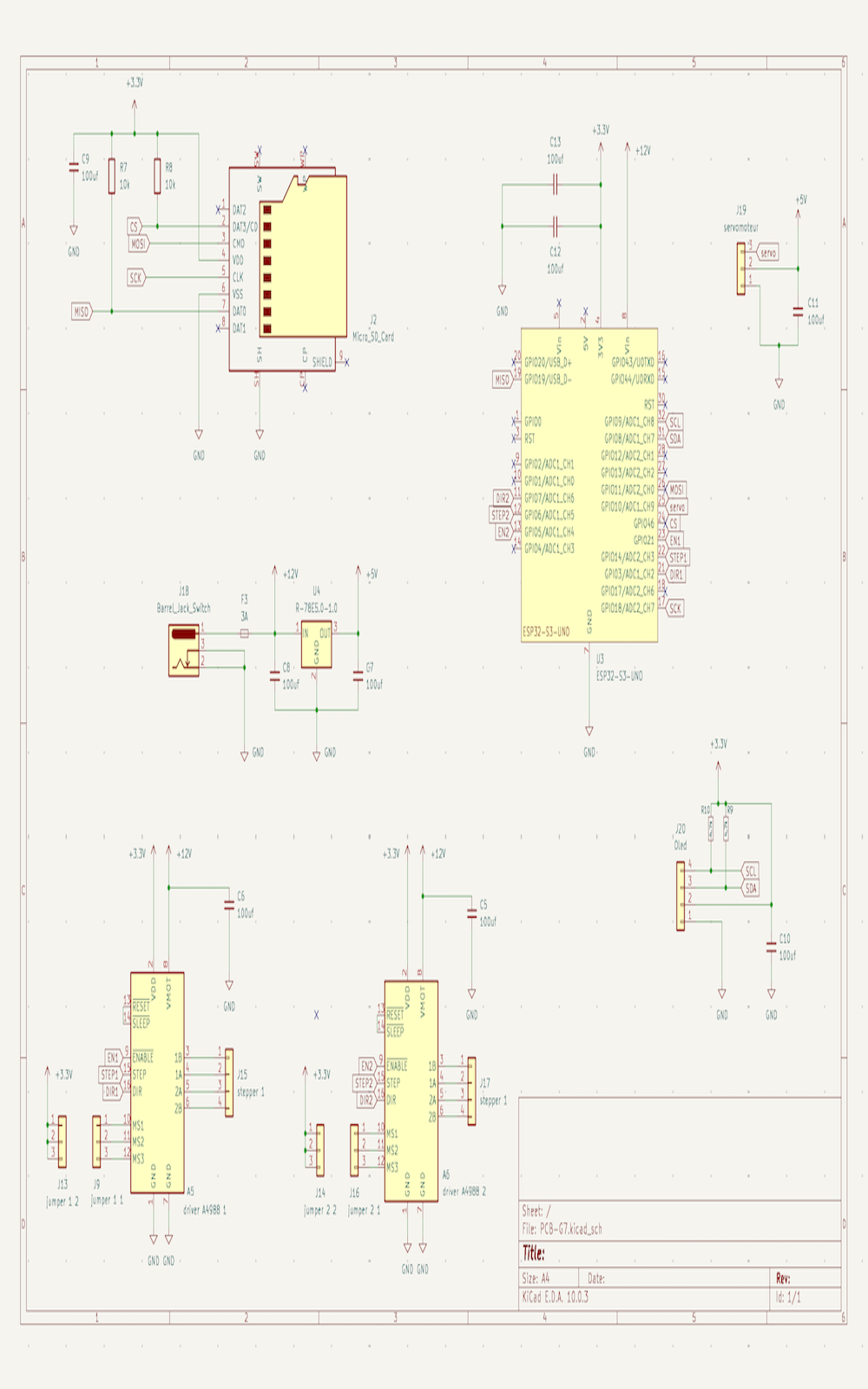
Le projet a été mené comme une chaîne complète d’ingénierie : modélisation 3D sous Onshape, fabrication des pièces, réalisation d’une carte électronique dédiée sous KiCad, intégration de l’ESP32, puis mise au point logicielle avec FluidNC, PlatformIO, p5.js et imagetracer.js.
Cette refonte conserve l’identité sombre rouge/noir du site existant tout en clarifiant le workflow global, les choix de conception et les livrables réels du projet.
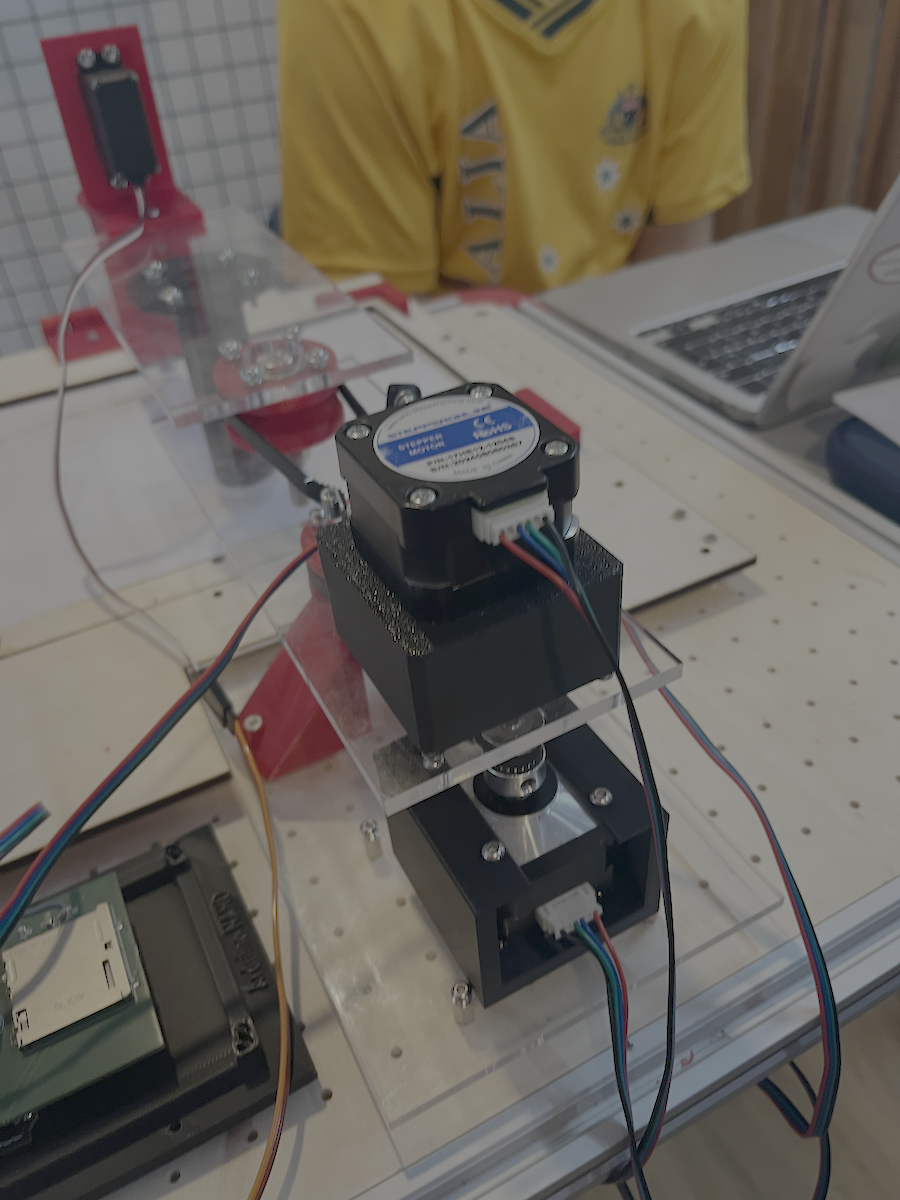
ArchitectureBras articulé 2 axes
CommandeESP32 + FluidNC
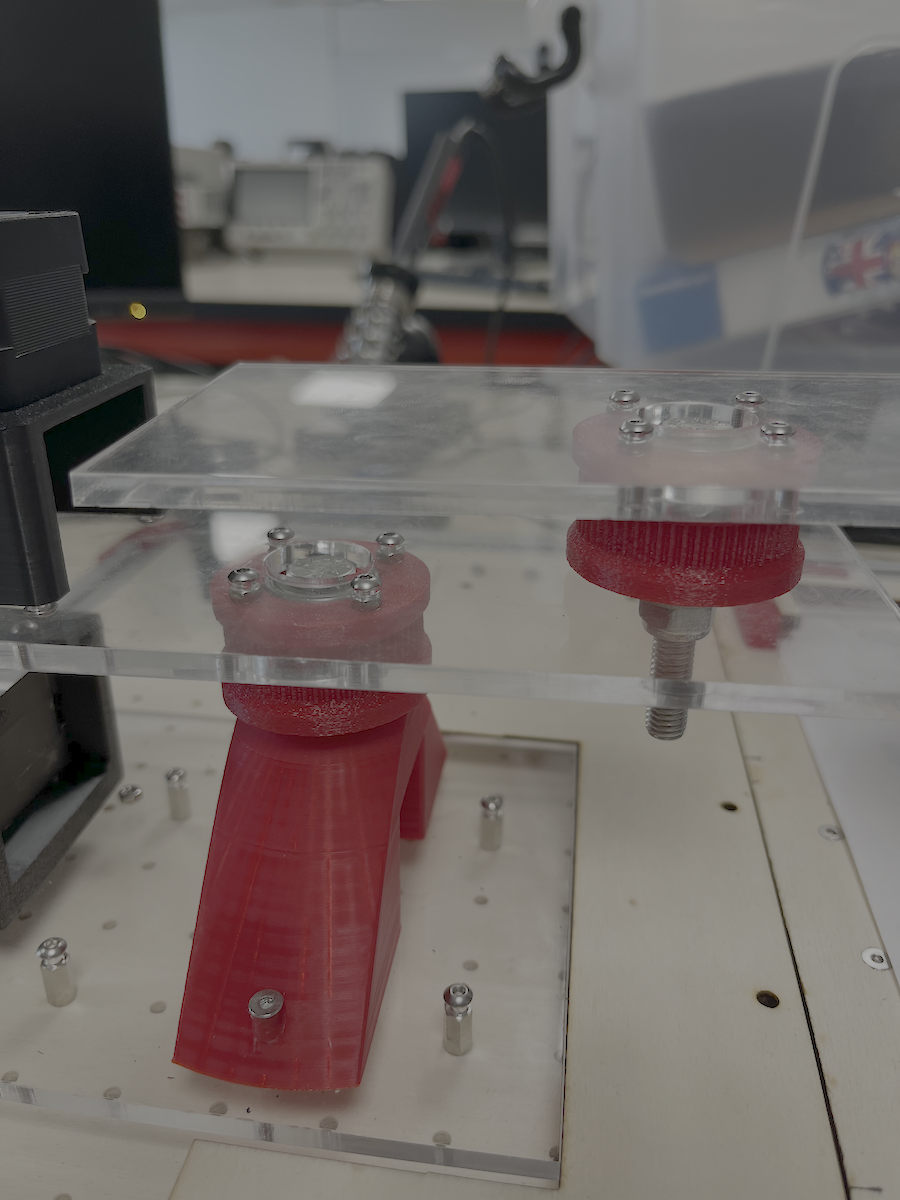
TransmissionPoulies, courroies GT2, roulements
FabricationImpression 3D + découpe laser
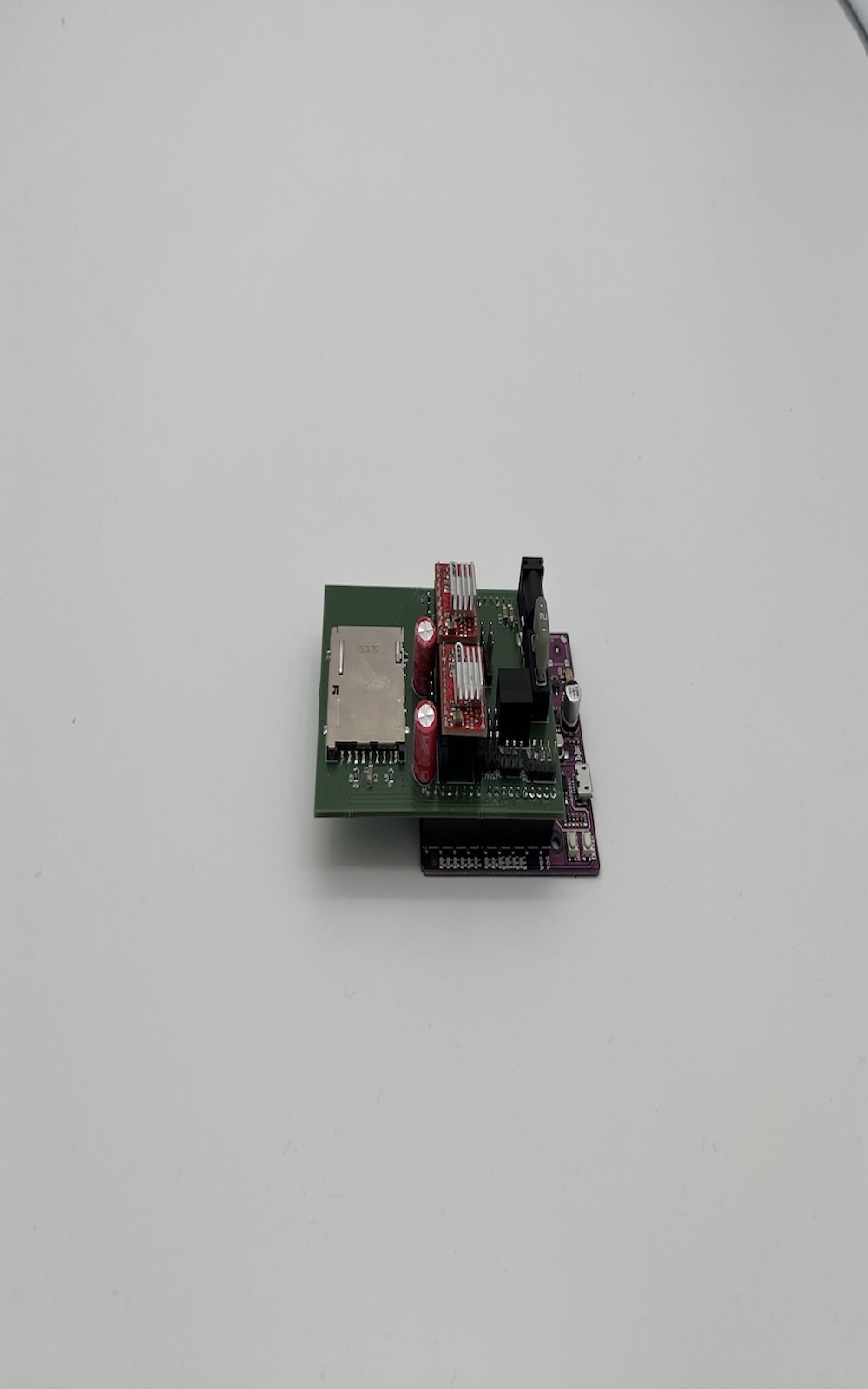
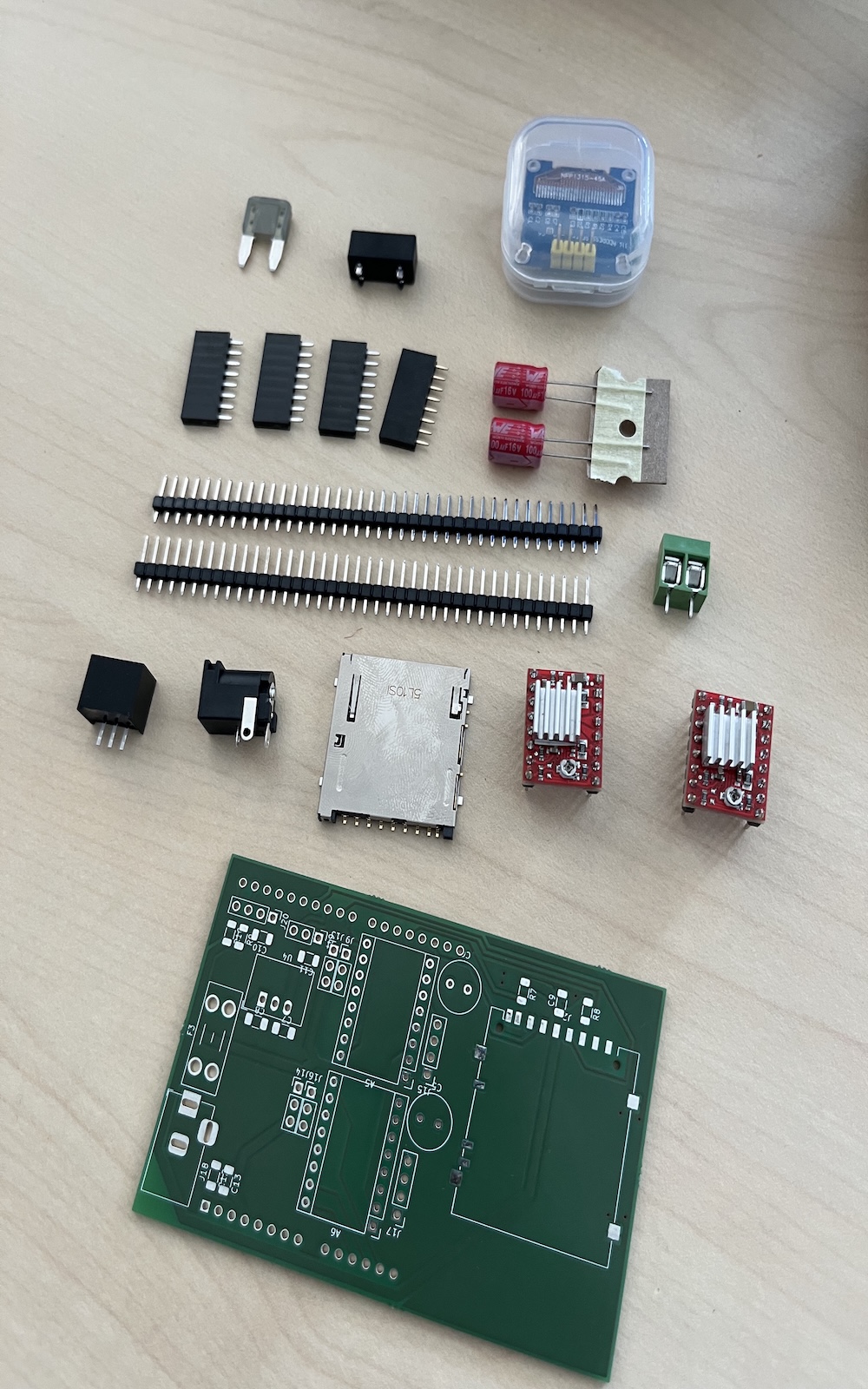
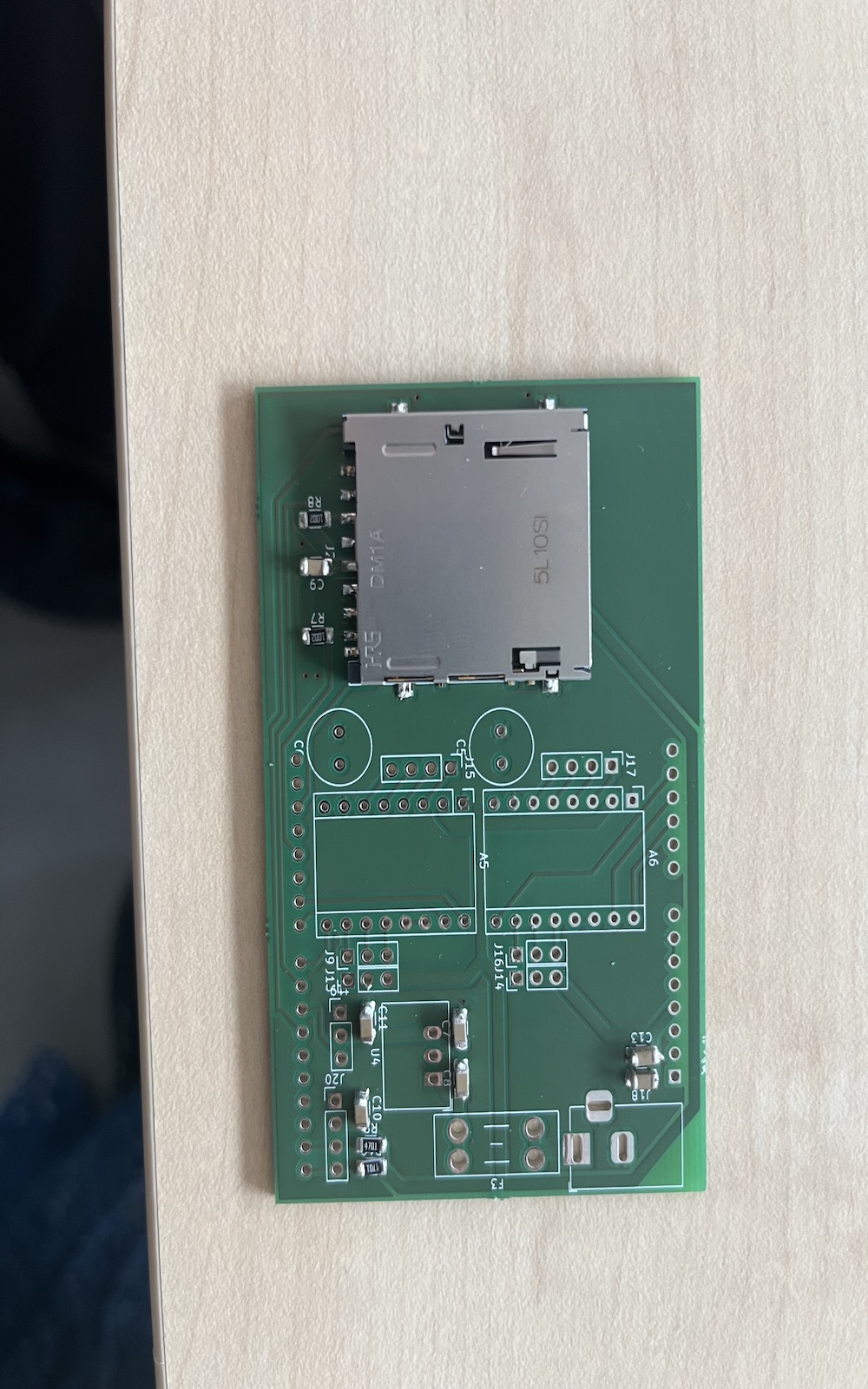
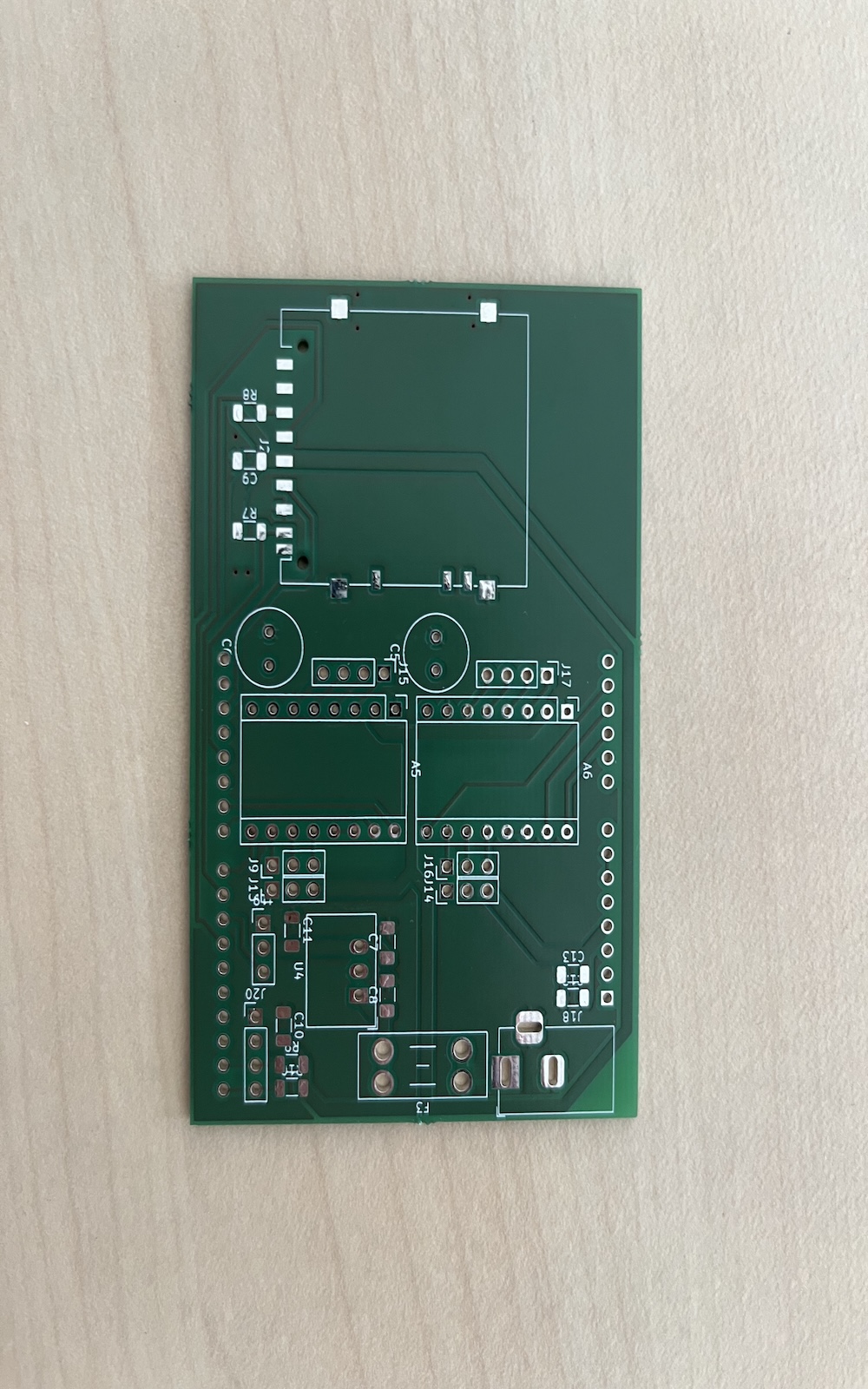
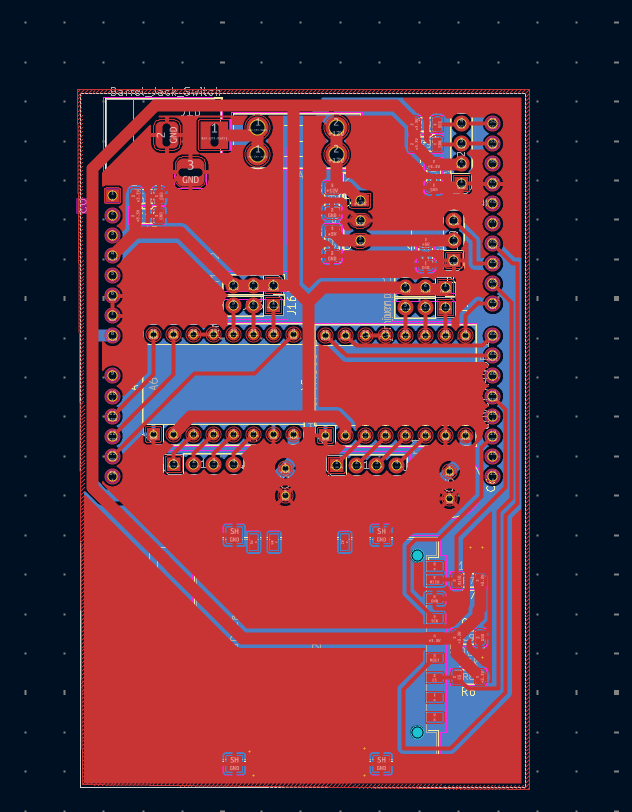
ÉlectroniquePCB custom avec carte SD
WorkflowImage → SVG → GCODE → Série → FluidNC